1. 이번 강좌에서 배울 수 있는 것과 개발 환경
앞으로 1~2주간은 ROS 2의 공식 튜토리얼 문서[1]를 기본으로 ROS의 기초적인 패키지, 노드, 토픽, 서비스, 액션, 파라미터, CLI 툴, rqt 툴에 대해 알아보도록 하겠다. 이 중 오늘 강좌에서는 [2], [3] 튜토리얼을 가지고 turtlesim 패키지를 이용하여 ROS 패키지의 설치, 노드의 실행, cli 툴 및 rqt 툴의 실행을 실습을 통해 알아보자. 참고로 튜토리얼 성격의 강좌를 진행하기 위해서는 서로 개발 환경을 맞추는게 좋다. 이 강좌의 개발 환경은 오로카 강좌 001 ROS 2 개발 환경 구축[4]에 자세히 기술해두었습니다. 개발 환경을 맞추고 시작하기를 원한다면 해당 강좌를 참고하자.
2. Turtlesim 패키지 설치
ROS 유저라면 사용해보지 않은 사람이 없을 정도로 유명한 패키지이자 ROS의 기본 기능을 가지고 있기에 많은 사람들이 튜토리얼로써 많이 이용하는 turtlesim을 가지고 이번 강좌를 진행하려고 한다. turtlesim은 기본적으로 001 ROS 2 개발 환경 구축[4]의 설치 방법대로 설치를 했다면 이미 설치가 되었을텐데 혹시 다른 방법으로 설치하였거나 지웠을 경우 하기와 같이 설치를 하면 된다.
$ sudo apt update
$ sudo apt install ros-foxy-turtlesim
3. Turtlesim 이란?
<이 내용은 turtlesim패키지의 역사를 담은 내용으로 TL;DR 이라고 생각하시는 분은 바로 다음 4번으로 이동하자.>
TMI이지만 turtlesim 패키지는 ROS 1 초창기부터 ROS 2의 현재까지도 ROS 커뮤니티에서 가장 널리 쓰이는 패키지인만큼 turtlesim에 대해 좀 더 자세히 알아보기로 하자. 뜬금 없을 수 있지만 영국의 역사학자 에드워드 카(Edward Hallett Carr)의 명언 중에 하나인 “역사는 현재와 과거 사이의 끊임없는 대화”라는 말같이 역사를 안다는 것은 지금까지의 지속적인 상호작용의 과정을 이해할 수 있기에 어떠한 것의 역사를 알고나면 왜 이러한 것이 세상에 나왔고 지금까지 널리 쓰이게 되는지 알 수 있게 된다.
turtlesim은 ROS 개발 초창기인 2008년에 ROS 창시자 Morgan Quigley 박사에 의해 시작된 ROS Tutorials 작업에 그 당시 ROS 툴 개발을 맡고 있던 Josh Faust에 의해 2009년에 turtlesim 이라는 이름으로 첫 소개되었다. turtlesim은 해당 소스 코드의 리포지토리가 [5]와 같이 ros_tutorials이라는 이름으로 쓰였고 그 하위에 속하는 패키지인것처럼 ROS를 처음 접하는 유저들에게 튜토리얼로 제공하기위해 ROS 패키지로 제작되었다. ROS의 학습용 패키지인만큼 패키지, 노드, 토픽, 서비스, 액션, 파라미터에 대한 기본적인 학습 및 이 패키지와 함께 CLI 툴, rqt 툴 연동도 체험해볼 수 있다. TMI로 이 패키지는 2009년 이후 지속적으로 업데이트되어오며 다양한 변천사를 거쳤는데 그림3과 같이 ROS 1과 2에 걸쳐서 아이콘이 배포판 이미지로 특화되어 지금의 ROS 2 Foxy까지 지속적으로 나오고 있다. 지금까지 Dirk Thomas, William Woodall, Tully Foote 등 많은 공헌자들이 있는데 그 중 우리 한국인으로는 이지훈씨가 표준 메시지(Twist) 사용으로 전환하는 공헌을 했으며 ROS 2로 넘어오면서 ROS 2 Crystal 버전까지 포팅되지 못해 바로 사용할 수 없었던 것을 임태훈씨가 ROS 1의 turtlesim을 ROS 2로 포팅하면서 ROS 2 Dashing 버전부터는 ROS 2 유저들이 사용할 수 있게 되었다.
이 turtlesim 패키지의 이름에는 거북이(turtle)가 사용되었다. 그리고 turtlesim 패키지의 turtlesim_node 노드를 실행하면 나오는 거북이 아이콘([6][7])에서도 모두 거북이(turtle)가 사용되었다. 이 이외에도 Open Robotics[8]의 ROS라는 트레이드 마크 로고의 Nine Dots[9]이 거북이 등껍질을 상징하고, ROS 배포판[10][11]들의 포스터에서는 거북이를 빼놓을 수 없고, ROSCon[12]의 포스터에서도 거북이가 자주 등장한다. 그리고 ROS 커뮤니티의 공식 모바일 로봇 플랫폼으로 널리 사용중인 TurtleBot[13]이라는 이름도 turtle이 포함될 정도로 ROS 커뮤니티에서 거북이는 마스코트와 같은 역할이 되었다.
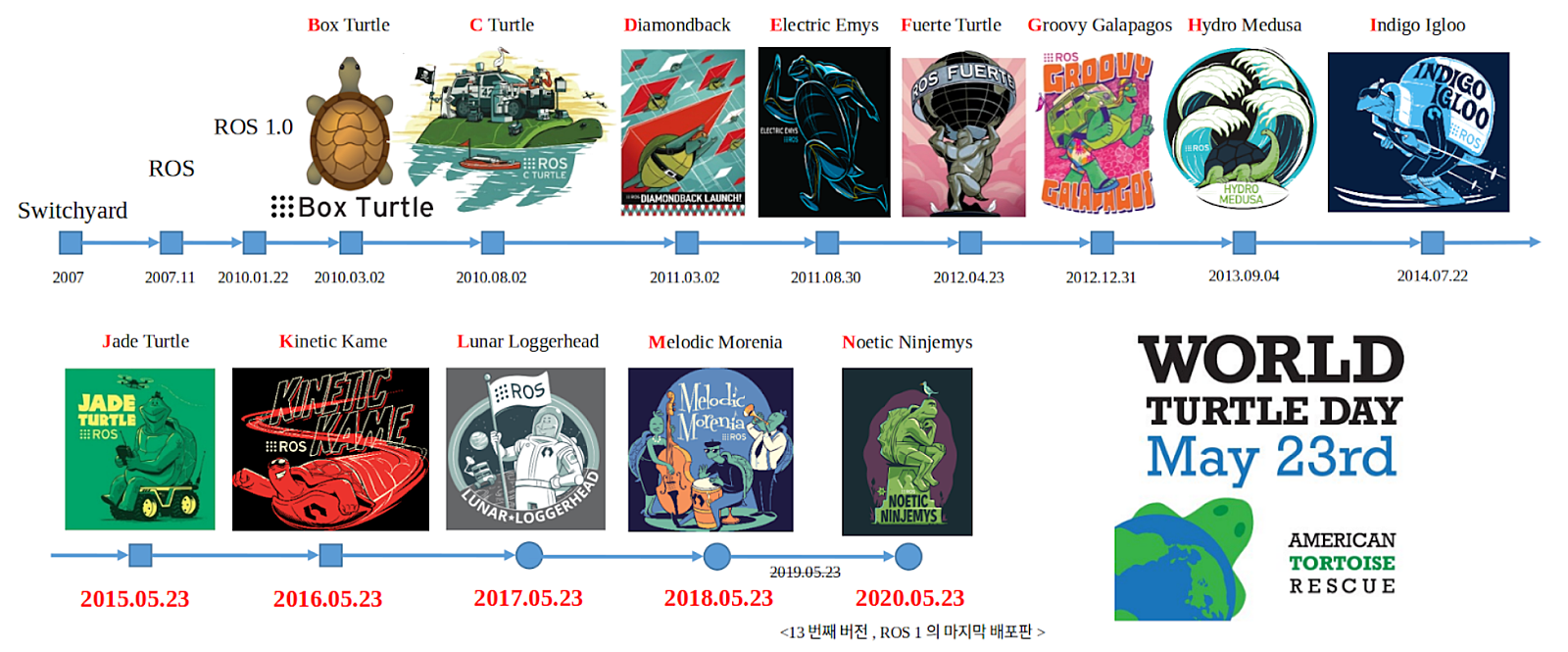
[그림1: ROS 1의 배포판]
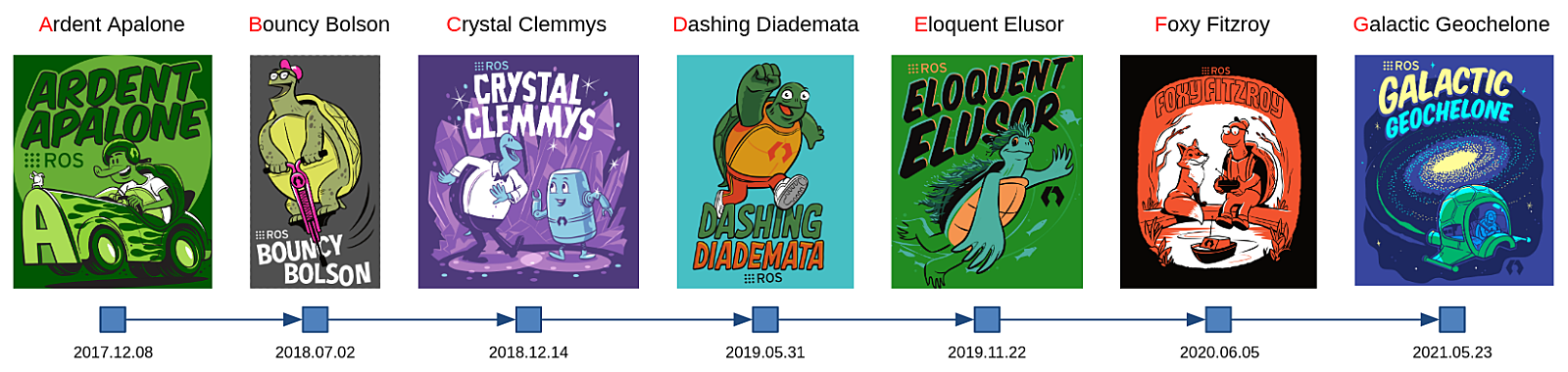
[그림2: ROS 2의 배포판]
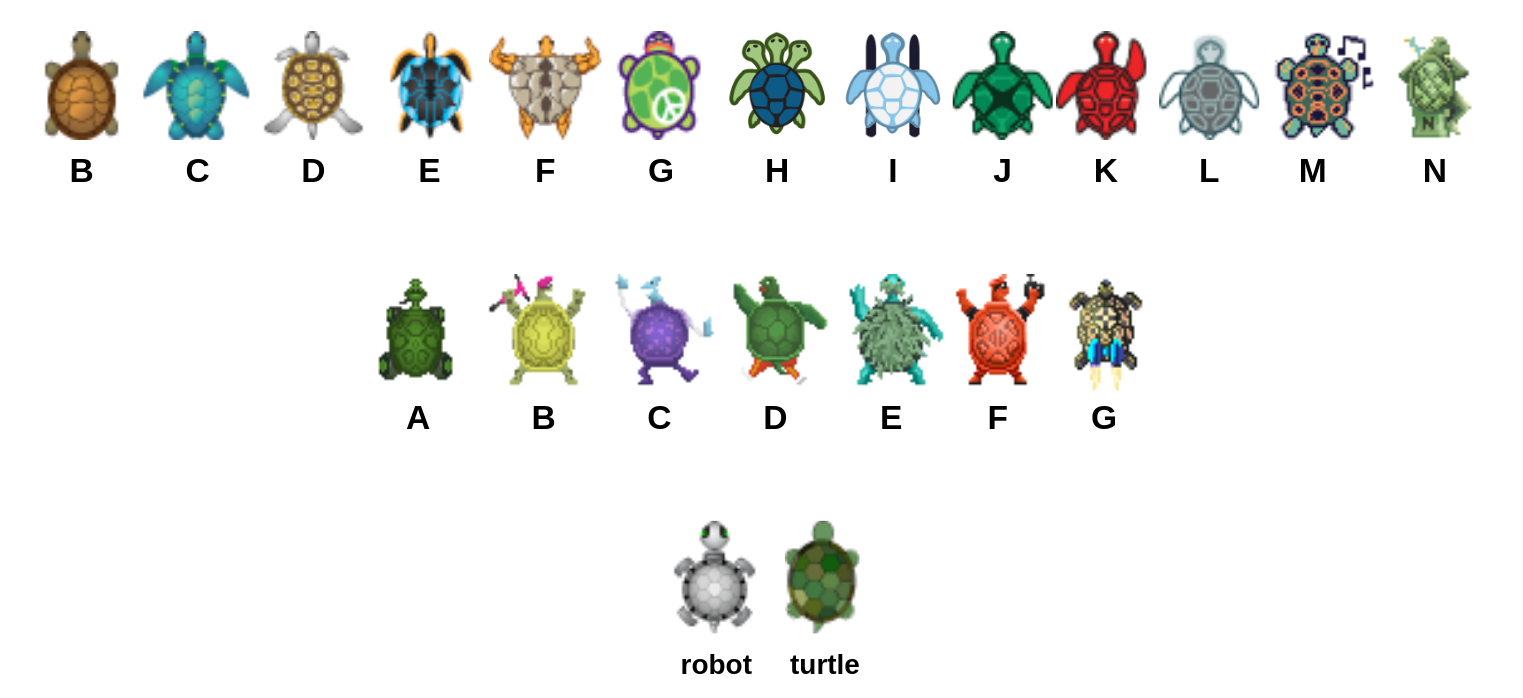
[그림3: turtlesim에 등록된 각 배포판별 커서 이미지]

[그림4: ROS의 Trademark]
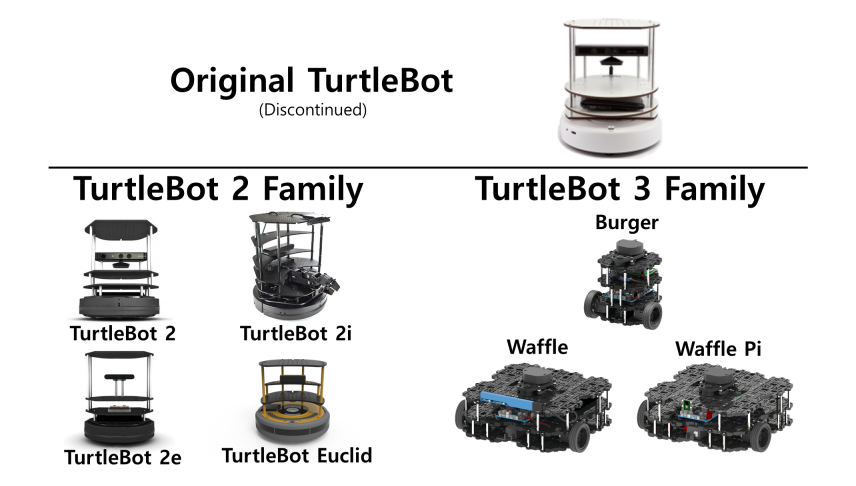
[그림5: ROS의 공식 모바일 로봇 플랫폼 TurtleBot 시리즈]
왜 이렇게 ROS 커뮤니티 사람들은 거북이(turtle)를 좋아하게 되었을까? 이를 알려면 turtlesim이 공개되고 2년 후인 2011년에 첫 출시된 TurtleBot[13]의 비하인드 스토리에 정리되어 알려졌다. 그 당시 Open Robotics의 소속의 TurtleBot의 초창기 개발자 Melonee와 Tully의 인터뷰 기사[14]에서 ROS 커뮤니티에서 거북이가 왜 등장하는지, 어떻게 응용되어 변화되었는지에 대해 자세히 설명되어 있어서 정리하여 소개한다.
본래 터틀(turtle)은 1967년에 개발된 교육용 컴퓨터 프로그래밍 언어인 로고(Logo, [15])를 사용하여 실제 로봇을 구동하기 위해 만들어진 터틀 로봇에서 유래되었다. 이 로봇이 나온지 50년이 넘었지만 로봇 중앙에 펜을 끼워 바닥에 그림을 그리는 역할을 한게 지금도 다양한 교육용 제품에서도 비슷한 컨셉이 나올정도이니 놀랍지 않을 수 없다. 참고로 터틀[16]이라는 로봇은 1940년대 William Grey Walter[17] 이 로봇은 이후에 실제 로봇이 아닌 컴퓨터 화면에 움직이는대로 라인이 생겨 그림을 그릴 수 있는 Turtle graphics[18][19]이라는프로그램으로 제공되어 아이들의 컴퓨터 프로그래밍 언어 교육에 사용되었다. Open Robotics 개발자들은 Logo 언어를 이용하여 컴퓨터 프로그래밍 언어를 쉽게 가르치자는 취지와 마찬가지로 거북이라는 친숙한 동물을 통해 ROS를 처음 다루는 사람들도 쉽게 배울 수 있게하자는 의미를 담아 ROS 공식 모바일 로봇 플랫폼에 TurtleBot이라는 이름을 붙였으며, 실제 로봇이 없더라도 컴퓨터 화면상에서 쉽게 ROS의 기본 개념을 설명하고자 turtlesim 이라는 프로그램을 제작하게 되었다. 처음 제작된 이후 10여년 가까이 오픈 로봇공학 플랫폼으로 개발자, 학생 등의 사이에서 가장 많이 사용되고 있는 ROS의 표준 플랫폼으로 자리 매김하였다.
[그림6: Logo의 Turtle graphics]
한 단계 더 깊숙이 들어가자면 교육용 컴퓨터 프로그래밍 언어인 로고(Logo)의 아버지라 부를 수 있는 시모어 페퍼트(Seymour Papert, 1928~2016)[20] 박사를 빼놓을 수 없다. 우리나라에는 많이 알려지지 않았지만 그는 수학자이자(무려 2번의 수학 박사학위 취득), 철학자이자, 컴퓨터 과학자, 교육자로 AI의 거장 마빈 민스키(Marvin Minsky, 1927~2016)와 함께 쓴 저서 퍼셉트론(Perceptron, 1970)가 있으며, 발달심리학자 장 피아제(Jean Piaget, 1896~1980)과 함께 최초의 어린이 교육용 컴퓨터 프로그래밍 언어인 ‘로고(Logo, 1968)’를 만들어 보급했고, 컴퓨터와 교육, 창의에 대한 교과서로 불리우는 교육철학서 마인드스톰(Mindstorms, 1980)의 저자이자 MIT Artificial Intelligence Laboratory의 공동 설립자인 시모어 페퍼트다. 그의 철학과 업적은 훗날 많은 사람들에게 영감을 주어 지금까지도 계승되어 발전되어오고 있다. ROS의 turtlesim과 TurtleBot이 그것이며 훗날 로고는 MIT 미디어랩의 스크레치(Scratch)의 전신이 되었고, Dynabook 은 그의 Turtle 에서 영감을 얻어 제작되었고, 덴마크의 레고사와 협력하여 그의 교육철학을 담아 Lego Mindstorms이 나왔으며 마빈 민스키와의 공정 저서 퍼셉트론(Perceptron, 1970)은 인공지능(AI) 연구의 주춧돌이 되었다. 더 깊이 들어가면 삼천포로 빠지니 그의 내용은 [20][21]을 참고하고 그의 추모글인 [22]을 읽어보도록 하자.
4. Turtlesim 패키지와 노드
앞선 강좌에서 설명했던 것과 같이 ROS에서는 프로그램의 재사용성을 극대화하기 위하여 최소 단위의 실행 가능한 프로세서라고 정의하는 노드(node) 단위의 프로그램을 작성하게 된다. 이는 하나의 실행 가능한 프로그램으로 생각하면 된다. 그리고 하나 이상의 노드 또는 노드 실행을 위한 정보 등을 묶어 놓은 것을 패키지(package)라고 하며, 패키지의 묶음을 메타패키지(metapackage)라 하여 따로 분리한다.
만약 자신의 개발 환경에 어떠한 패키지가 있는지 알아보기 위해서는 아래와 같은 ROS 2의 CLI(Command Line Interface) 툴을 사용하면 된다. 그 중 pkg 명령어를 터미널에서 실행하면 이미 설치된 패키지 및 본인이 직접 작성한 패키지까지 포함하여 수백개의 패키지의 리스트를 확인할 수 있을 것이다. turtlesim를 설치하였다면 이 리스트에도 포함되어 있을 것이다.
$ ros2 pkg list (생략)
이번에는 turtlesim 패키지에 포함된 노드가 어떤 것들이 있는지 알아보도록 하자. 터미널에서 아래와 같이 ros2 pkg executables <패키지명>을 사용하면 turtlesim 패키지에 포함되어 있는 다수의 노드를 확인할 수 있다. 총 4가지로 draw_square, mimic, turtle_teleop_key, turtlesim_node 노드이다. 각 노드의 역할은 다음과 같다.
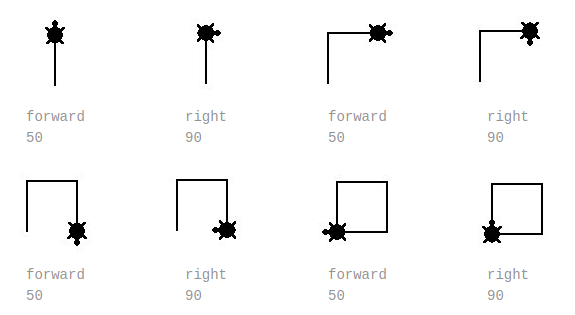
- draw_square: 사각형 모양으로 turtle을 움직이게하는 노드
- mimic: 유저가 지정한 토픽으로 동일 움직임의 turtlesim_node를 복수개 실행시킬 수 있는 노드
- turtle_teleop_key: turtlesim_node를 움직이게 하는 속도 값을 퍼블리시하는 노드
- turtlesim_node: turtle_teleop_key 으로부터 속도 값을 토픽으로 받아 움직이게 하는 간단 2D 시뮬레이터 노드
$ ros2 pkg executables turtlesim turtlesim draw_square turtlesim mimic turtlesim turtle_teleop_key turtlesim turtlesim_node
5. Turtlesim 패키지의 노드 실행
4개의 노드 중에 가장 널리 사용하는 turtlesim_node 노드와 turtle_teleop_key 노드를 ROS 2의 CLI(Command Line Interface) 툴의 run 명령어를 이용하여 실행시켜보자. turtlesim_node 노드를 실행하면 파란색 창에 거북이 한마리가 보일 것이다. 그 뒤 다른 터미널에서 turtle_teleop_key 노드를 실행시키면 화살표키로 turtlesim_node 노드의 거북이를 움질일 수 있게 된다. 더 많은 기능들이 있는데 이는 토픽, 서비스, 액션, 파라미터 강좌에서 더 자세히 다루기로 하자.
$ ros2 run turtlesim turtlesim_node
$ ros2 run turtlesim turtle_teleop_key

[그림7: turtlesim_node의 실행 화면]
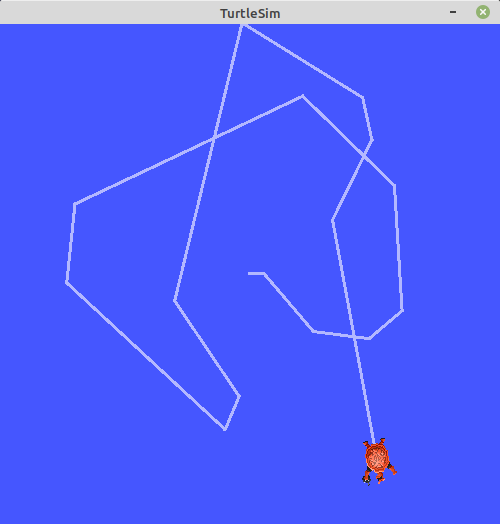
[그림8: turtle_teleop_key를 이용해 거북이를 이동시킨 모습]
6. 노드, 토픽, 서비스, 액션의 조회
여기서 중요한 것은 두 노드간의 동작이 단순히 키보드 값을 전달하여 움직이는게 아니라 눌려진 키보드의 키값에 해당되는 병진 속도(linear velocity)와 회전 속도(angular velocity)를 geometry_msgs 패키지의 Twist 메시지 형태로 보내고 받는 다는 것이다. 참고로 turtle_teleop_key 노드를 실행시킨 후 거북이를 움직일 수 없다는 분들이 있는데 이는 해당 터미널 창을 클릭하고 활성화 시킨상태에서 화살표키를 입력값으로 받아들이기 때문이다. 주의하자.
이번에는 현재 어떠한 노드들이 실행되어 있는지, 어떻나 토픽들이 있는지, 어떠한 서비스와 액션이 있는지 알아보자. 이를 위해서는 각 명령어 node list, topic list, service list, action list를 터미널창에서 실행시키면 된다. 아래의 예제는 turtlesim_node와 turtle_teleop_key가 실행되어 있을 때의 결과 값이다.
$ ros2 node list /turtlesim /teleop_turtle
$ ros2 topic list /parameter_events /rosout /turtle1/cmd_vel /turtle1/color_sensor /turtle1/pose
$ ros2 service list /clear /kill /reset /spawn /teleop_turtle/describe_parameters /teleop_turtle/get_parameter_types /teleop_turtle/get_parameters /teleop_turtle/list_parameters /teleop_turtle/set_parameters /teleop_turtle/set_parameters_atomically /turtle1/set_pen /turtle1/teleport_absolute /turtle1/teleport_relative /turtlesim/describe_parameters /turtlesim/get_parameter_types /turtlesim/get_parameters /turtlesim/list_parameters /turtlesim/set_parameters /turtlesim/set_parameters_atomically
$ ros2 action list /turtle1/rotate_absolute
7. rqt_graph 로 보는 노드와 토픽의 그래프 뷰
이번에는 ROS 2 CLI 툴이 아닌 ROS 2 GUI툴을 써보자. 하기와 같이 터미널 창에서 rqt_graph를 실행시키면 각 노드와 토픽, 액션이 표시된다. 이 툴을 통해 현재 개발 환경에서의 모든 노드와 토픽, 액션을 그래프 뷰로 확인할 수 있다. 그림9에서 보이는 동그라미가 노드이고, 네모는 토픽 또는 액션이며 화살표는 메시지의 방향을 의미한다. 여기서 서비스가 빠져있는데 서비스는 필요시 순간적으로 사용되는 형식이라 표시가 안되며, 액션은 토픽와 유사한 Pub, Sub 통신 방식의 응용이기에 표시되고 있다.
$ rqt_graph
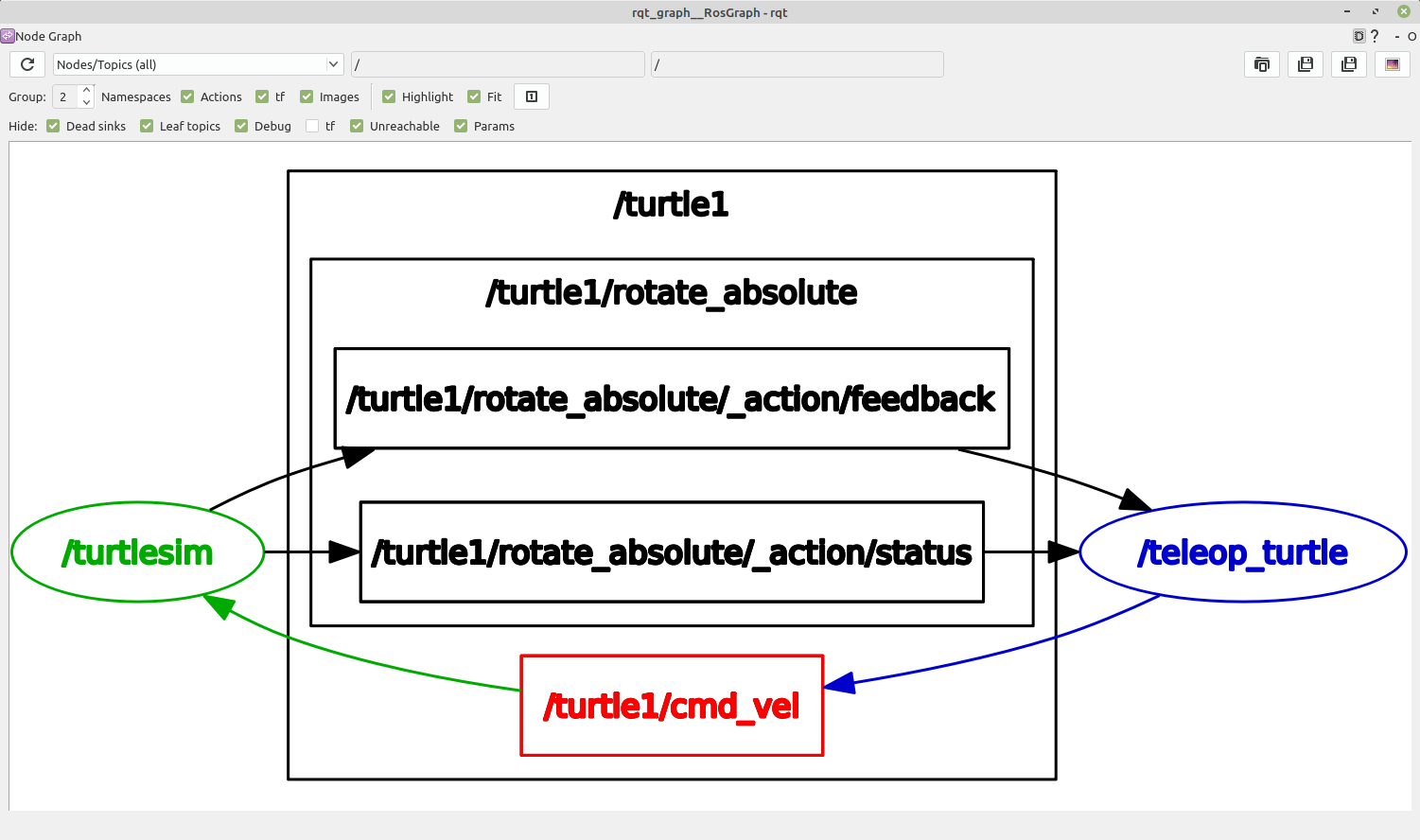
[그림9: rqt_graph 실행 화면]
이상으로 간단히 Turtlesim 패키지를 통해 패키지, 노드에 대해 알아보았다. Turtlesim 에는 더 많은 기능들이 있는데 이는 토픽, 서비스, 액션, 파라미터 강좌에서 더 자세히 다루기로 하자.
[참고 자료]
[1] https://index.ros.org/doc/ros2/Tutorials/
[2] https://index.ros.org/doc/ros2/Tutorials/Turtlesim/Introducing-Turtlesim/
[3] https://index.ros.org/doc/ros2/Tutorials/Understanding-ROS2-Nodes/
[4] 001 ROS 2 개발 환경 구축, https://cafe.naver.com/openrt/25288
[5] https://github.com/ros/ros_tutorials
[6] https://github.com/ros/ros_tutorials/tree/noetic-devel/turtlesim/images
[7] https://github.com/ros/ros_tutorials/tree/foxy-devel/turtlesim/images
[8] https://www.openrobotics.org/
[9] https://www.ros.org/press-kit/
[10] http://wiki.ros.org/Distributions
[11] https://index.ros.org/doc/ros2/Releases/
[12] https://roscon.ros.org/
[13] https://www.turtlebot.com/
[14] https://spectrum.ieee.org/automaton/robotics/diy/interview-turtlebot-inventors-tell-us-everything-about-the-robot
[15] https://en.wikipedia.org/wiki/Logo_(programming_language)
[16] https://en.wikipedia.org/wiki/Turtle_(robot)
[16] https://en.wikipedia.org/wiki/William_Grey_Walter
[18] https://en.wikipedia.org/wiki/Turtle_graphics
[19] https://el.media.mit.edu/logo-foundation/what_is_logo/history.html
[20] https://en.wikipedia.org/wiki/Seymour_Papert
[21] https://el.media.mit.edu/logo-foundation/what_is_logo/logo_and_learning.html
[22] https://www.hankookilbo.com/News/Read/201608270461393704
3. 노드 목록 (ros2 node list)
현재 개발 환경에서 동작 중인 노드의 목록을 보기를 원한다면 아래와 같이 ros2 node list 명령어를 통해 확인할 수 있다. 위에서 실행은 총 3개로 rqt 툴까지 포함하여 3개의 노드의 목록이 결괏값으로 받아 볼 수 있다. 노드 파일명과 실제 노드 이름은 다를 수 있다는 것도 알아두자. turtlesim_node 노드 파일은 turtlesim라는 노드명으로 실행되어 있고, turtle_teleop_key 노드 파일은 teleop_turtle이라는 노드명으로 실행되었다. rqt_graph는 rqt의 하나의 플러그인 형태로 rqt_gui_py_node_28168이라는 노드 이름으로 실행되었는데 rqt의 다양한 툴, 그리고 동일한 툴도 복수개 실행할 수 있도록 rqt 플러그인 류의 툴은 노드 이름에 임의의 번호가 붙게 된다는 것도 알아두자.
$ ros2 node list
/rqt_gui_py_node_28168 /teleop_turtle /turtlesim
만약 동일 노드를 복수개 실행하려고 한다면 ros2 run turtlesim turtlesim_node 같이 이전과 같이 그대로 실행시켜도 되지만 동일한 노드 이름으로 실행되어 된다는 점을 기억해야 한다. 동일 이름으로 실행되게 되면 시스템을 구성하는 데에 있어서 복잡하게 된다. 만약 노드명을 달리하고 싶다면 아래와 같이 노드 명을 변경하여 실행시키면 된다.
$ ros2 run turtlesim turtlesim_node __node:=new_turtle
이때에 실행 중인 노드 목록을 확인하는 아래 명령어로 다시 확인하면 new_turtle이 새롭게 추가되었음을 알 수 있다. rqt_graph 상에서도 그림 9와 같이 지정된 이름을 실행되었음을 확인할 수 있다. 현재에는 그림 9와 같이 노드의 이름만 변경되었을 뿐 토픽인 turtle1/cmd_vel은 변경되지 않았음을 알 수 있다. 그리고 teleop_turtle 노드를 이용하여 거북이를 움직여보면 두 개의 노드의 거북이들이 모두 동일하게 움직이는 것을 볼 수 있는데 동일한 토픽을 이용하기 때문이다. 이 토픽 또한 토픽명을 변경하거나 name_space를 통해 바꿀 수 있는데 이는 해당 내용을 설명하는 토픽 및 launch 강좌 때에 자세히 다루도록 하겠다.
$ ros2 node list
/rqt_gui_py_node_29017 /teleop_turtle /new_turtle /turtlesim

[그림9: new_turtle 명을 이용한 노드가 추가된 모습]
4. 노드 정보 (ros2 node info)
노드의 정보를 확인하기 위해서는 아래와 같이 ros2 node info 명령어에 정보를 보기 위한 노드명을 지정하면 된다. 이 정보에는 지정된 노드의 Publishers, Subscriber, Service, Action, Parameter 정보를 확인할 수 있다.
$ ros2 node info
/turtlesim /turtlesim Subscribers: /parameter_events: rcl_interfaces/msg/ParameterEvent /turtle1/cmd_vel: geometry_msgs/msg/Twist Publishers: /parameter_events: rcl_interfaces/msg/ParameterEvent /rosout: rcl_interfaces/msg/Log /turtle1/color_sensor: turtlesim/msg/Color /turtle1/pose: turtlesim/msg/Pose Service Servers: /clear: std_srvs/srv/Empty /kill: turtlesim/srv/Kill /reset: std_srvs/srv/Empty /spawn: turtlesim/srv/Spawn /turtle1/set_pen: turtlesim/srv/SetPen /turtle1/teleport_absolute: turtlesim/srv/TeleportAbsolute /turtle1/teleport_relative: turtlesim/srv/TeleportRelative /turtlesim/describe_parameters: rcl_interfaces/srv/DescribeParameters /turtlesim/get_parameter_types: rcl_interfaces/srv/GetParameterTypes /turtlesim/get_parameters: rcl_interfaces/srv/GetParameters /turtlesim/list_parameters: rcl_interfaces/srv/ListParameters /turtlesim/set_parameters: rcl_interfaces/srv/SetParameters /turtlesim/set_parameters_atomically: rcl_interfaces/srv/SetParametersAtomically Service Clients: Action Servers: /turtle1/rotate_absolute: turtlesim/action/RotateAbsolute Action Clients:
$ ros2 node info /teleop_turtle /teleop_turtle Subscribers: /parameter_events: rcl_interfaces/msg/ParameterEvent Publishers: /parameter_events: rcl_interfaces/msg/ParameterEvent /rosout: rcl_interfaces/msg/Log /turtle1/cmd_vel: geometry_msgs/msg/Twist Service Servers: /teleop_turtle/describe_parameters: rcl_interfaces/srv/DescribeParameters /teleop_turtle/get_parameter_types: rcl_interfaces/srv/GetParameterTypes /teleop_turtle/get_parameters: rcl_interfaces/srv/GetParameters /teleop_turtle/list_parameters: rcl_interfaces/srv/ListParameters /teleop_turtle/set_parameters: rcl_interfaces/srv/SetParameters /teleop_turtle/set_parameters_atomically: rcl_interfaces/srv/SetParametersAtomically Service Clients: Action Servers: Action Clients: /turtle1/rotate_absolute: turtlesim/action/RotateAbsolute
지난 강좌에서 패키지에 대해 알아봤고 이번 강좌에서는 노드와 메시지 통신에 대해 집중적으로 알아보았다. 이어지는 강좌에서는 토픽, 서비스, 액션, 파라미터 순으로 메시지 통신에 대해 더 자세히 알아보겠다.